Counterfactuals¶
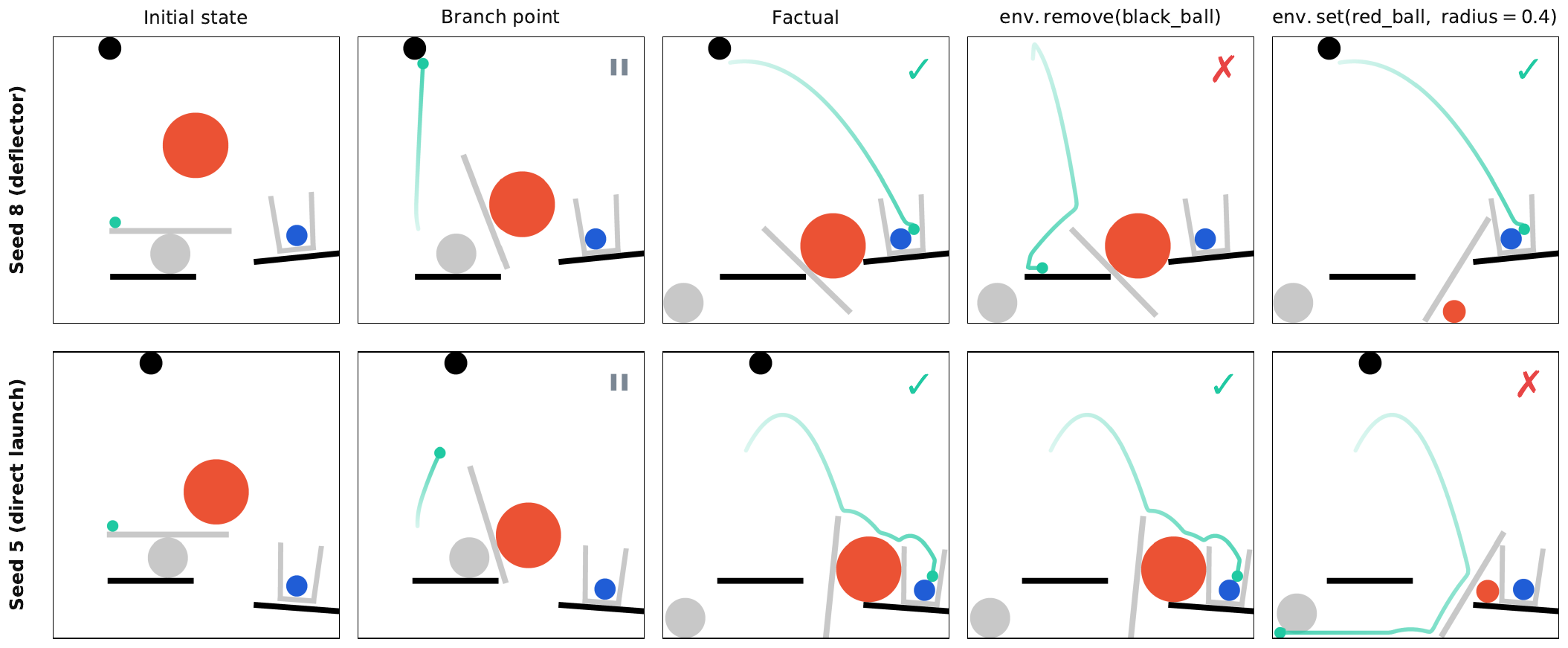
Causal analysis with branching simulations - compare "what happened" vs "what could have happened".
Overview¶
This example demonstrates:
- Capturing state at a branch point
- Running factual and counterfactual branches with
env.branch() - Comparing outcomes
Key Concepts¶
Counterfactual Reasoning¶
"Would the outcome have been different if I had intervened?"
- Run simulation to an event of interest
- Capture exact state
- Run two (or more) branches with different interventions
- Compare outcomes
Branch Point¶
The moment where you capture state and diverge into multiple trajectories.
snapshot, step = env.run_until(on_contact("a", "b"), action=...)
# snapshot is the branch point
Branching Pattern¶
env.branch(snapshot) is a context manager that restores the simulation to snapshot on both entry and exit. Each with block is an independent branch from the same point.
env = InterphyreEnv("level", seed=0, enable_interventions=True)
# Run to branch point
trigger = on_contact("green_ball", "blue_ball")
snapshot, step = env.run_until(trigger, action=action, max_steps=500)
# Factual branch
with env.branch(snapshot):
env.step_physics(200)
factual_success = env.success
# Counterfactual branch
with env.branch(snapshot):
env.impulse("green_ball", (10, 5))
env.step_physics(200)
counterfactual_success = env.success
# Compare
causal_effect = int(counterfactual_success) - int(factual_success)
Running the Example¶
python demos/counterfactuals.py
Expected Output¶
Counterfactual Analysis Demo
1. Running until contact
Contact at step 343
2. Factual branch (no intervention)
green_ball final pos: (3.39, -4.46)
Success: False
3. Counterfactual branch (impulse intervention)
green_ball final pos: (-2.11, -4.46)
Success: False
4. Comparison
Factual: FAILURE
Counterfactual: FAILURE
Position divergence: 5.50 units
Multiple Counterfactuals¶
Test several interventions from the same snapshot:
interventions = [
("no_action", None),
("impulse_left", lambda e: e.impulse("green_ball", (-10, 0))),
("impulse_right", lambda e: e.impulse("green_ball", (10, 0))),
("freeze", lambda e: e.set("green_ball", velocity=(0.0, 0.0), angular_velocity=0.0)),
]
results = {}
for name, intervention in interventions:
with env.branch(snapshot):
if intervention is not None:
intervention(env)
env.step_physics(200)
results[name] = env.success