Configuration¶
SimulationConfig¶
SimulationConfig controls physics, contact tracking, and intervention settings. It is used by Box2DEngine and InterphyreEnv.
Key fields:
fps,time_step,velocity_iters,position_itersgravity,do_sleep,continuous_collision_detection,substepping,continuous_physics,warm_startingtrack_all_contacts,track_relevant_contacts_onlystationary_tolerance,stationary_check_frames,default_success_time,max_stepsenable_interventions,intervention_max_snapshots,intervention_auto_cleanupenable_profiling,log_step_times
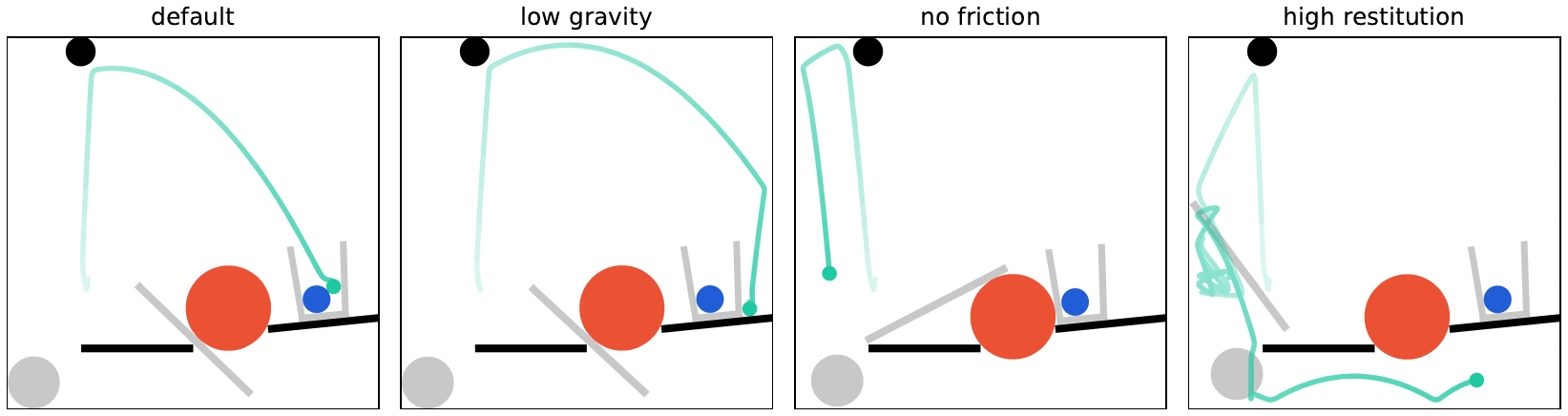
The same level under four physics configurations — default, low gravity, no friction, and high restitution:
Construction:
from interphyre.config import SimulationConfig
config = SimulationConfig(time_step=1/60, enable_interventions=True)
PerformanceProfiler¶
PerformanceProfiler tracks step timing, render timing, and contact update timing when profiling is enabled.
Common usage:
from interphyre.config import PerformanceProfiler
profiler = PerformanceProfiler(enabled=True)
The engine enables profiling automatically when SimulationConfig.enable_profiling is set.
Constants¶
PRECISION: rounding precision used across the simulator.CONTACT_DISTANCE_TOLERANCE: tolerance used when validating contacts.